
算法
Q 学习算法(Q-Learning Algorithm)的思路比较简单:使用 Q 函数记录每一个状态下每一个动作(action)的期望最大总回报(reward),即 Q 值。在推理时贪心地选择当前状态 Q 值最大的动作,从而达到最大化期望总回报的目的。当问题的状态与动作均为离散时,Q 函数可以使用表格记录,这个表格也称为 Q 表格(Q-Table)。
设:
- 问题的状态空间为 $S = {1,
2,\ldots, m}$; - 问题的动作空间为 $A = {1,
2,\ldots, n}$; - 探索阈值为 $\epsilon\in [0,1]$(推理时 $\epsilon = 0$);
- 学习率 $\eta\in [0,1]$;
- 回报衰减率 $\gamma\in [0,1]$。
则 Q 学习算法的流程如下:
- 初始化 Q 表格为零矩阵 $Q=O_{m\times n}$;
- 设初始时间 $t = 0$,状态为 $s_t = s_0$;
- 选择动作 $a_t$:取随机数 $r\in[0,1]$,若 $r<\epsilon$,则当前为探索阶段,从 $A$ 随机选取一个动作;否则 $a_t = \argmax_{j\in A} Q_{s_t, j}$;
- 与环境交互,执行动作 $a_t$,并获得状态 $s_{t+1}$、回报 $r_t$;
- 按照 Bellman 方程 更新Q表格: $$Q_{s_t, a_t} \leftarrow (1-\eta) Q_{s_t, a_t} + \eta(\gamma\max_{j\in A} Q_{s_{t+1},j} + r_t),$$ 其中 $\max Q_{s_{t+1},j}$ 为 转移后的状态 $s_{t+1}$ 下最大的Q值,加上 $r_t$,组成转移前状态 $s_t$ 下 $a_t$ 操作的Q值。将其与原来的 $Q_{s_t, a_t}$ 加权平均就得到了更新后的Q值。
- 时间 $t\leftarrow t+1$,回到第 3 步。
实现
Frozen Lake
以 Gym 的 Frozen Lake 环境为例,其状态空间与动作空间都是离散的,因此适合使用 Q 表格。这个环境共有 $4^2=16$ 种状态,4 种动作,分别对应上下左右四个移动方向。环境中slippery引入的不确定性太大(每次行动只有$1/3$的概率能真正前往指定的方向),因此这里创建环境时is_slippery一项设为False。
实现如下:
| |
原环境提供的回报函数所含的信息较少(仅在抵达终点时为 1,其余情况均为 0),不利于算法的收敛,因此我在实现中重新设计了回报函数。 此外,训练时采用线性衰减的探索阈值 $\epsilon$ ,即训练初期倾向于探索(exploration),后期倾向于开发(exploitation)。
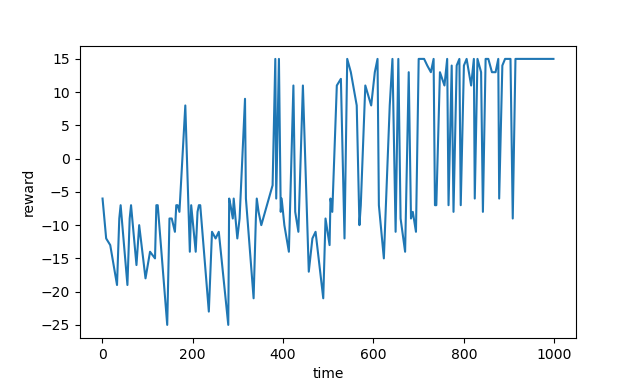
训练时每轮的 t 与该轮获得的总 reward 的折线图如下:
推理时算法选择的路线如下图,确实是最优路线之一。

除了 Frozen Lake,这个方法也可以用来求解 Gym 提供的 Cliff Walking、Taxi 与 Blackjack。但是,随着问题规模的增大,训练步数也需要相应地增加。
Cliff Walking
这个环境有 48 种状态和 4 种动作,因此 Q 表格内共有192项。以下是训练了 10,000 步的结果(平均每项 52 步):
Taxi
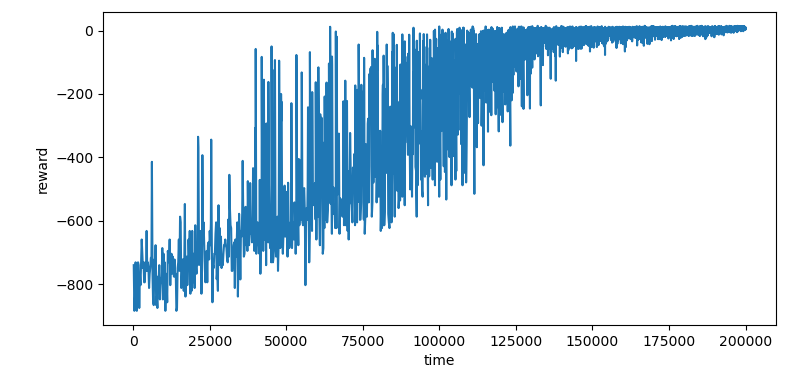
这个环境有 500 种状态和 6 种动作,对应 Q 表格的 3000 项。以下是训练了 200,000 步的结果(平均每项 67 步):
Blackjack
Blackjack 有 $32\times 11\times 2=704$ 种状态和 $2$ 种动作,在处理时需要将离散的状态向量映射到非负整数域内。 这个游戏的状态转移存在不确定性,即使是充分训练($5\times 10^6$ 步)的Q表格也只能将胜率从完全随机时的 28.2% 提升到 39.3%。
分析
优点
- 算法简单,易于理解和实现。
局限性
- 基于 Q 表格的 Q 学习算法只能处理输入输出都是离散的问题;
- 基于 Q 表格的 Q 学习算法不能跨实例学习,即在遇到新的问题实例时,需要从 0 开始重新探索;
- 基于 Q 表格的 Q 学习算法难以处理训练过程中没有见过的状态;
- 当状态空间或动作空间很大时,Q 表格的规模也会很大,从而需要更长的学习时间。
上述问题可以通过引入神经网络缓解,即深度 Q 学习算法(Deep Q-Learning Algorithm)。